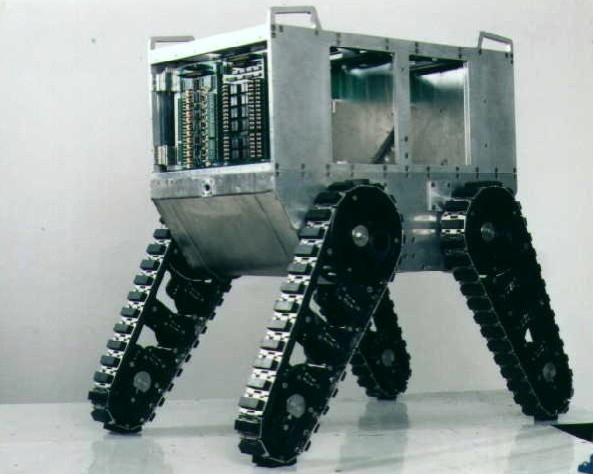
Mobile teleoperator, carrier of special-purpose technological superstructures MT – 15

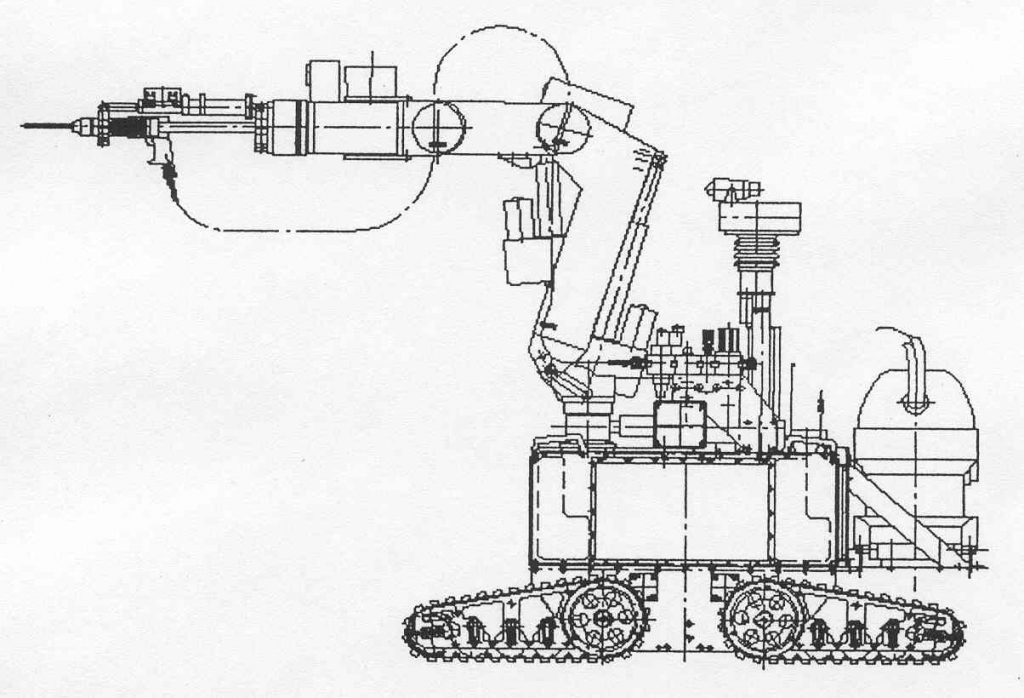
It is a remote-controlled two-arm articulated manipulator with 5 degrees of freedom placed on the chassis of a four-track concept or. a wheel. The drive of the teleoperator is electric, while the energy source is batteries located in the chassis or it is possible to solve the power supply via cable. The exterior version uses a chassis with an internal combustion engine and a generator.
Popis
The teleoperator control system consists of the following modules:
- control computer
- pulse converter block
- wireless communication modules
- teleoperator camera system.
The control computer ensures the interoperability of all teleoperator modules. It contains a digital input module, a digital output module, analog inputs and a serial line module. The program memory is realized by the SSD module. The pulse converter block controls the drive of the six chassis motors or the seven motors of the handling arm. Wireless communication modules provide duplex transmission of control commands through two independent channels in the 338 MHz band. Communication modems guarantee the transmission of control commands and the reverse transmission of data on the status of the teleoperator without the occurrence of errors. The two-channel system provides control even in the event of a single channel failure. The camera system of the teleoperator consists of six cameras. Simultaneously with the image transmission, the transmission of stereo sound picked up by a pair of microphones is also ensured.
The control workplace of the teleoperator is stationary and consists of a seat for the operator, a control cabinet, a stand with a monitor and a stand with antennas. On the upper part of the control box there is a master-slave controller kinematically identical to the handling arm of the teleoperator. The signals from the controller are processed by an industrial-type control computer, which is located in the lower part of the cabinet. The travel of the teleoperator is controlled by a separate controller, on the handles of which there are buttons for controlling the tilting of the belts. A separate stand with a monitor, speakers and control panel is designed to display the scene captured by the cameras, display information about the status of the teleoperator, sound reproduction, control of surveillance cameras, camera selection and acoustic signaling. To perfectly convey the image perception, the operator has a helmet on his head, which allows a stereoscopic display of the scene captured by the cameras. Deployment is expected in NPPs in ecological accidents, disposal of unexploded ordnance, in the fight against terrorism, etc.
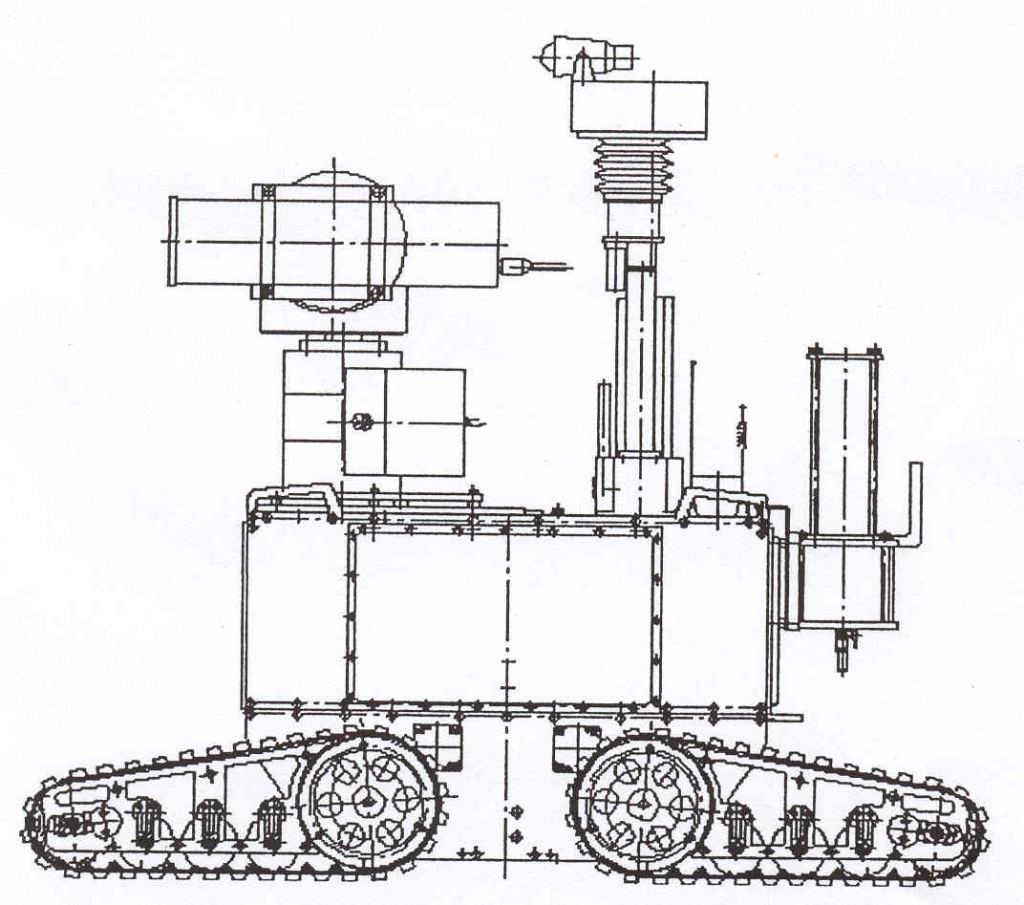
In the mentioned applications, the technological possibilities of the teleoperator are extended by purpose-built superstructures to:
- decontamination of surfaces (solutions, foams, mechanical brushes, milling of the surface layer, etc.)
- sampling (abrasion from the surface, suction of air or liquid, drilling of material, etc.)
- environmental analysis by sensors and analyzers located directly on the teleoperator with wireless data transmission to the control station.
Basic parameters:
- curb weight 119 kg
- installed power 800 W
- movement speed max. 0.37 m / s
- payload 146 kg